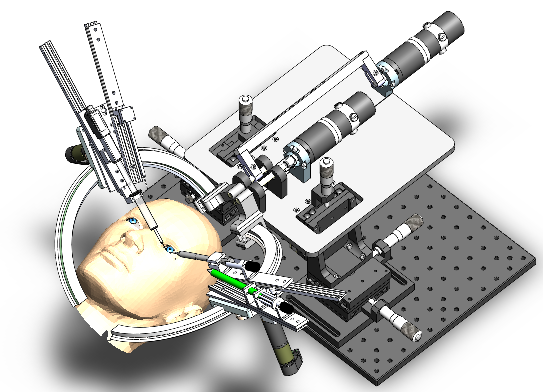
| Intraocular Robotic Interventional and Surgical System (IRISS) | |
The IRISS is the result of research collaboration between the Mechatronics and Control Laboratory and the Jules Stein Eye Intitute . The research vision is to develop a surgical platform capable of performing anterior and posterior surgical procedures via teleoperation and/or automation. The IRISS has the unique capability to manipulate two surgical instruments simultaneously through ocular incisions spaced millimeters apart. The large range of motion of the manipulator allows for both anterior and posterior surgical instrument positioning. To facilitate comprehensive surgical procedures, the IRISS can automatically alternate between multiple surgical instruments on each arm. Dedicated master surgical manipulators and microscope mounted cameras allow for 3-D teloperated surgical visualization based commands. This configuration also lends itself to computer vision based intervention. |
|
 |
|
Researchers: |
|
Related Publications:
|
|